
My Projects
**Note: All project cards are links. Click them for more info
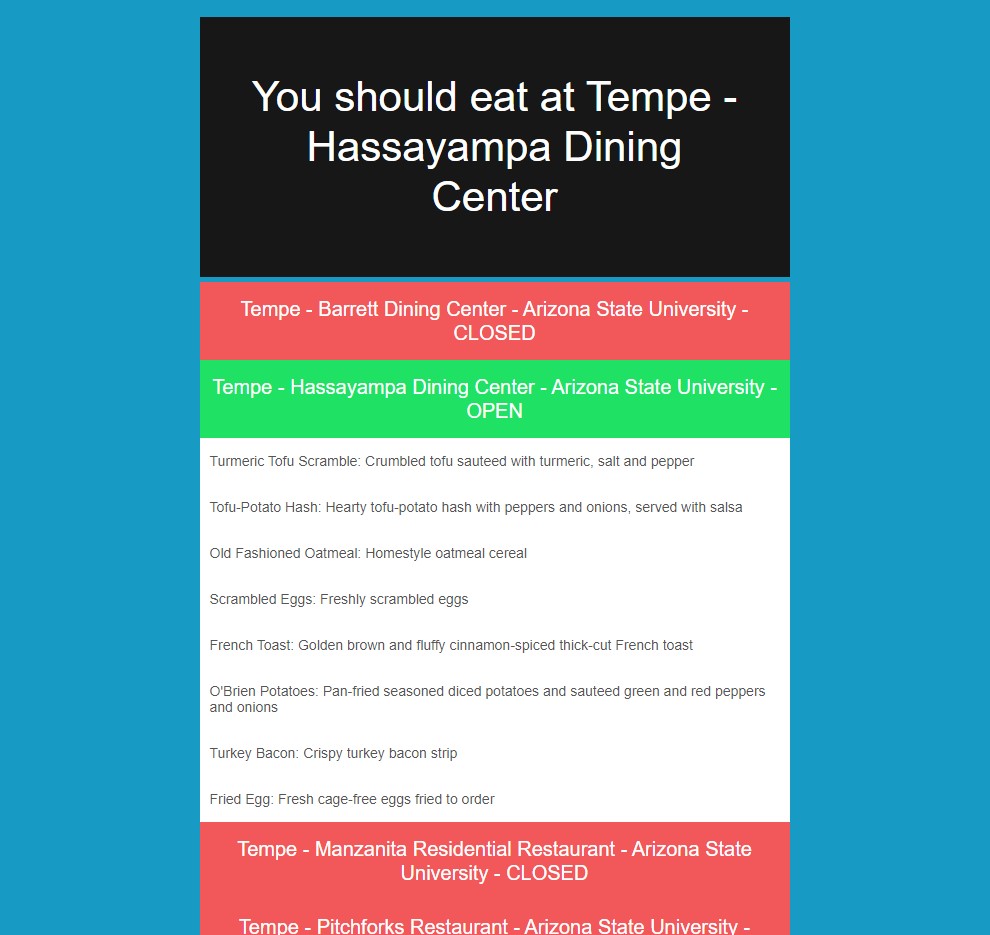
ASU Dining Hall Selector
A web scrapping program built to eliminate the hassle of checking the ASU Dining Hall menus individually to determine the optimal dining hall to eat food of your interest. The program scrapes data from ASU's online dining hall menus and compares each menu item to your liked and disliked foods. Each dining hall is scored based on a points system based on several factors. The dining hall with the most points is suggested to the user. Here is the points guide:
- 1 pt if Dining hall is OPEN
- 1 pt for keyword match with LIKES array
- 1 pt for keyword match in description with LIKES array
- (DISLIKES are omitted entirely from list)
To make the program more accessible, I have designed it to send a rather well styled email with a summary of the status and items being served at all dining halls. These emails are sent at preprogrammed times which can be changed by the user.
Click on the text to view the Github repository...
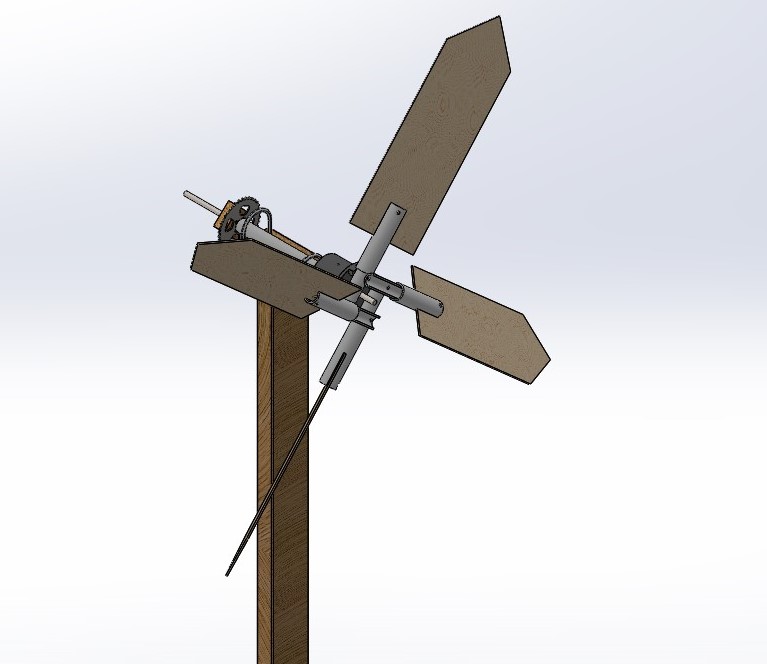
DIY Windmill
Simple flatplate windmill design with modular blade angle and replaceable blades. Challenge: design and build with only spare parts at hand (no purchasing components)
Capable of producing an average of 3v (which can be boosted to 12v via a boost converter to charge a 12v battery or power an inverter)
Variations:
- Direction pointed: NORTH, West
- Number of blades: 2, 4 (OPTIMAL)
- Blade Angle: around 30 deg
Click on this card to view the CAD files (available on GrabCAD)

Fitbit Versa 2 Battery Clockface
Basic and clean clock face which represents battery level with ring color surrounding time. Clock shows seconds, time, and date.
When charging your fitbit, an extra thicker ring appears to indicate charging status.
Basic capabilities:
- CHARGING: Thick green ring
- Battery Status: Thin inner ring
- RED: 1 - 20% charge
- ORANGE: 21 - 30% charge
- GREEN: 31 - 100% charge
SIR Epidemic Model
SIR Epedemic Model to simulate a basic epedemic.
Follows the assumption that once infected and recovered, the person has developed some form of immunity to the virus. I will continue to develop more complex test cases to determine the infection growth rate under different situations.
Hoping to prove the effectiveness of 'stay at home orders' in response to the coronavirus pandemic.
Color Coding:
- Red Dots (w/ white inner): Infected, not immune
- Black dots: uninfected and not immune
- Red dots (not shown in image): immune

IOT Face-Detection Surveillance Camera
Using Raspberry Pi Zero to run face-detection algorithm. When a face is detected, a picture is taken and sent to Desktop Linux machine via ssh. Additionally, the image is sent to my email to notify me that someone has been detected. Setup was originally positioned in front of Dorm door. Takes a picture of everyone enterring/exiting door. (Served as a Ring Doorbell)
Click the card to view the best picture I have captured yet...
Color Coding:
- Button LED == GREEN: Face Detected and Picture Taken
- Button LED == RED: Sending Email
- Privacy LED == GREEN: Successfully saved picture
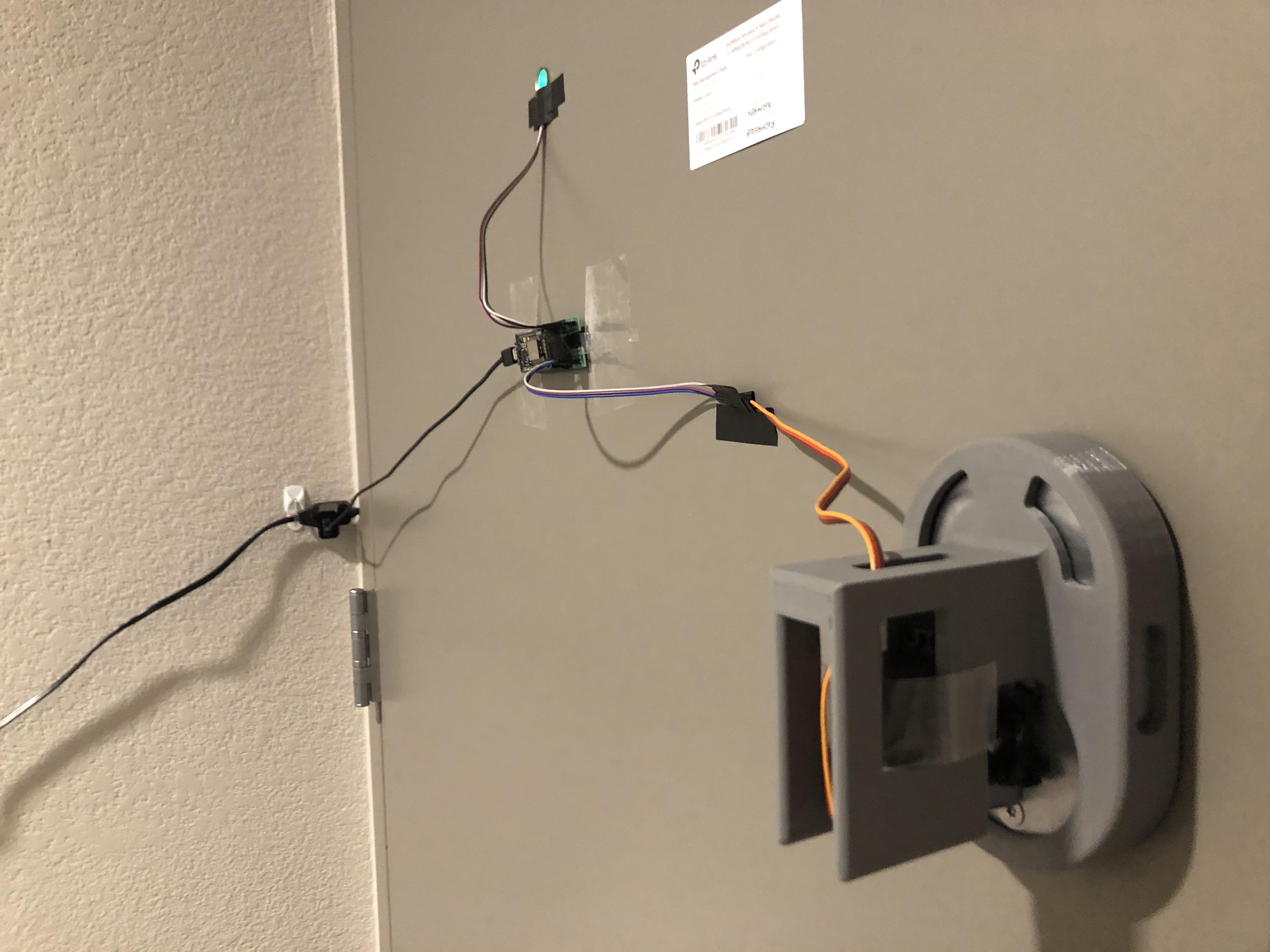
IOT Dorm Lock
Designed/Printed Mount to control Dorm Door Lock via App or Smart Home Assistant.
Shown is the hardware setup on the door...
Full setup includes:
- Servo + 3D Printed Mount
- IOT Lock Chip
- RGB LED (placed in viewer peep-hole)
Click the card to view my Blynk Web control interface...
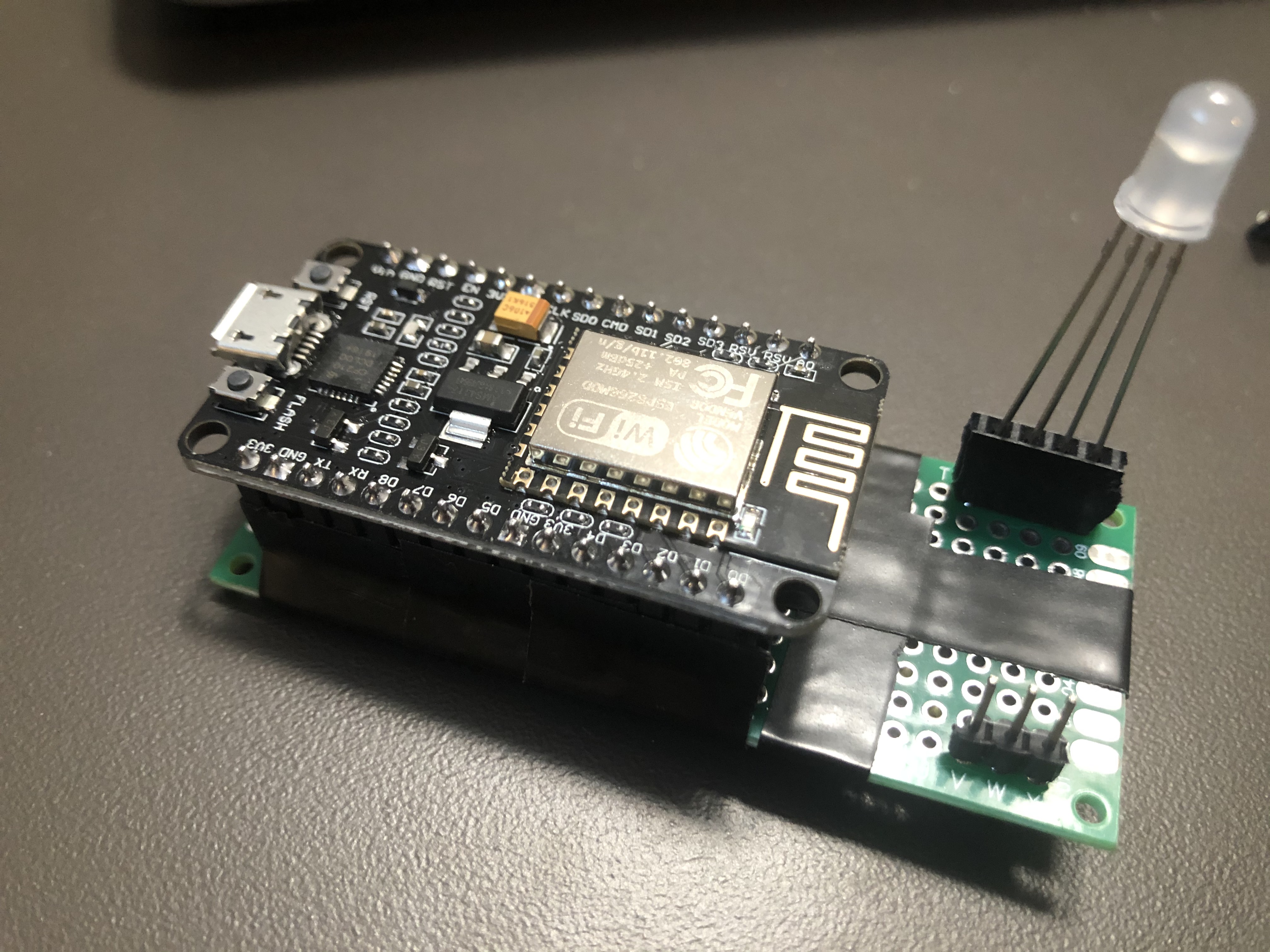
IOT Dorm Lock: Custom Board
Manufactured board to consist RGB LED to view lock status outside of the door. Microcontroller being used: NodeMCU ESP8266
LED Color Codes:
- RED: Locked State
- GREEN: Unlocked State
- BLUE: Auto-Reboot. Lost WIFI connection
3 pin connector for lock servo. WIll eventually incorporate transistor to disengage servo what lock state is not being changed. Will enable servo to spin freely allowing the lock to be used with a key(in case of malfunction).

Gyro Stabilized Rocket Mark 2
Current version incorporates fin stabilization with 4 fins equally spaced out. 4 fins provide roll, pitch, and yaw stability. Powered by 1s 500mah lipo battery with Arduino Uno flight controller. Modular stage of TARC-style rocket with body tube diameter (2.5")
Upcoming:
- 3 fin stabilization for smaller rocket
- 2-fin stabilization EXPERIMENTAL
- thrust vectoring stabilization
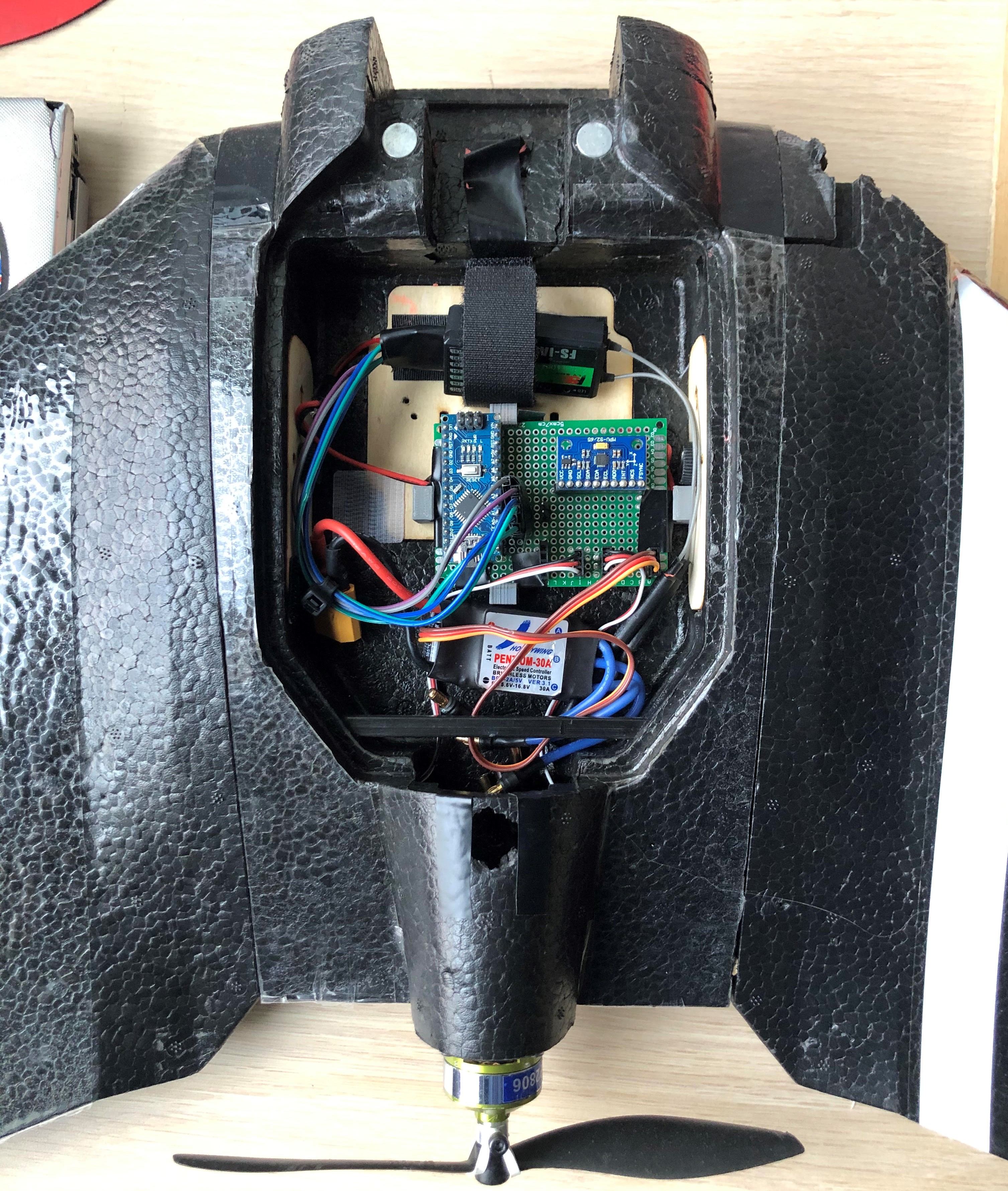
Arduino UAV
The project above is my personal research project to make a cheap autonomous UAV. This project is based off an Arduino Nano and currently has the ability to stabilize itself in flight while maintiaining a pre-programmed altitude. This feature will be upgraded to work in GPS waypoint flight.
UAV Equipped with:
- Arduino Flight Controller 2.0
- Arduino Nano V3
- MPU9250 Mag/Accel/Gyro
- Barometer
- RUNCAM + 600mw VTX
- Flysky Reciever
- 2200mah 3s LIPO
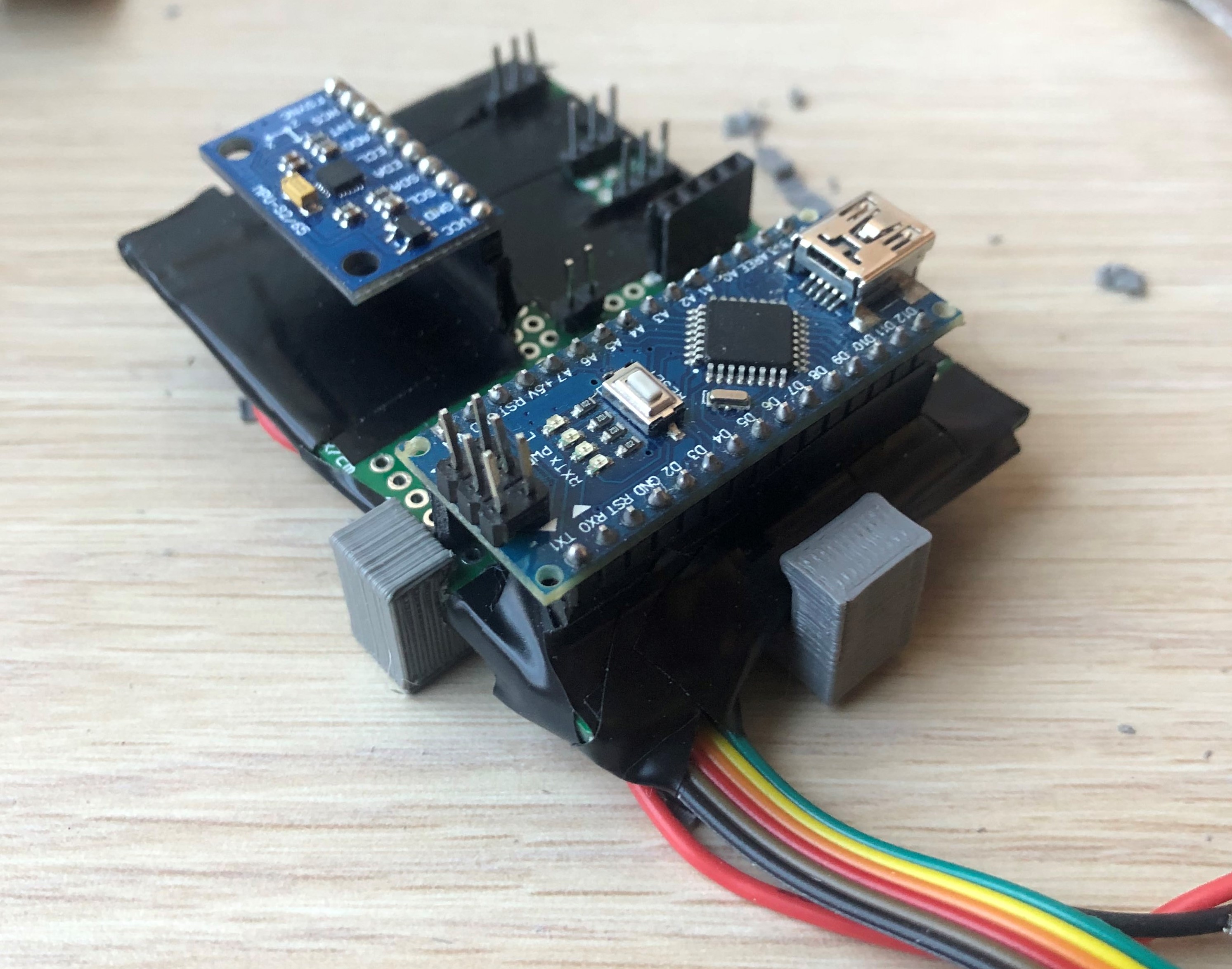
Flight Controller 2.0
The picture above is the flight controller that is currently being used in the cheap autonomous UAV. This flight controller was equipped with a gyro/magnetometer, an altimeter, and a buzzer.
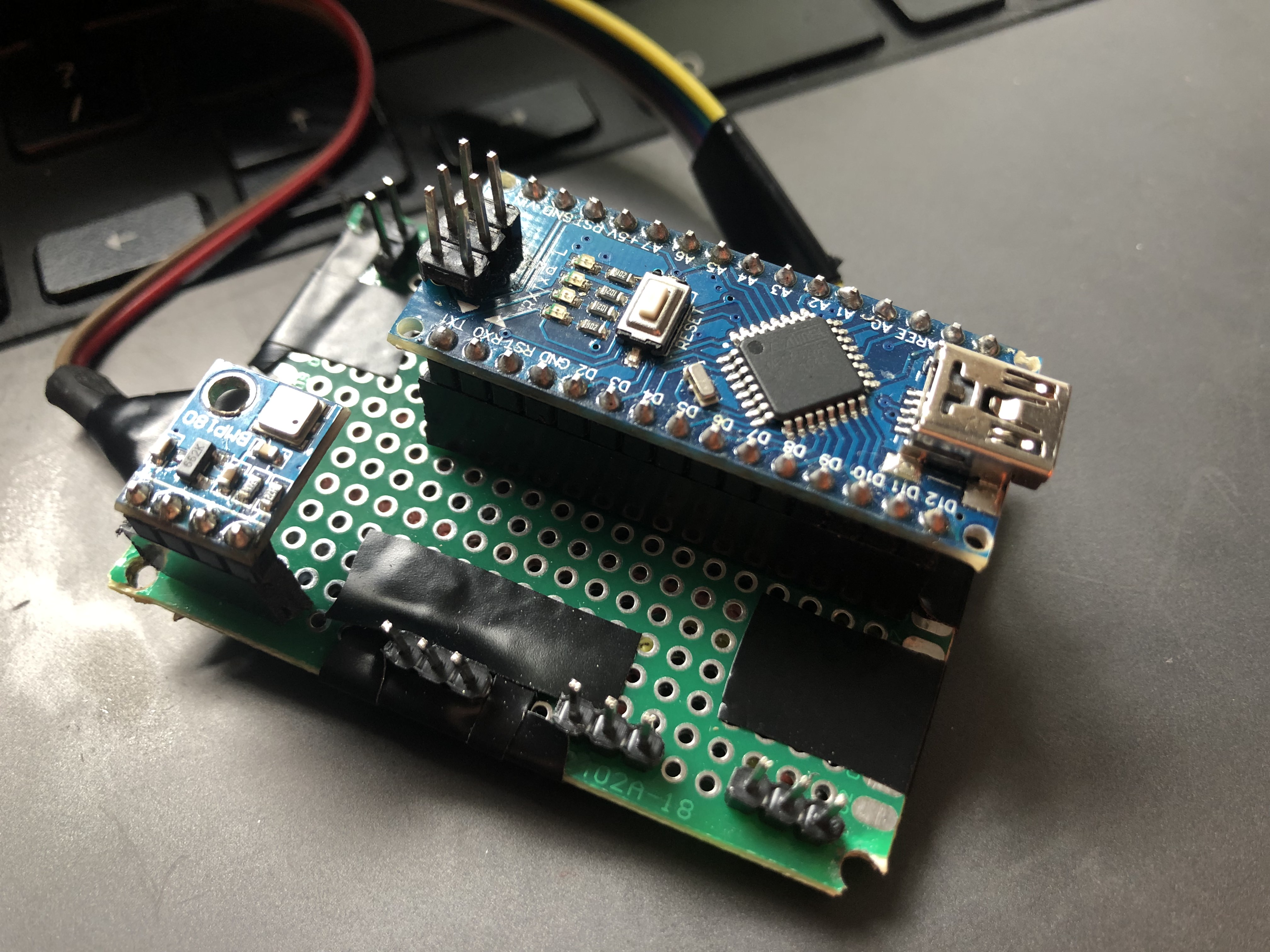
Flight Controller 1.0
The picture above is the first flight controller that I had developed for my personal research project. It enabled RC flight, but had an altitude hold mode in which throttle and elevons could be modulated to maintain a specified altitude.

Camera Rocket Mark 2
The following rocket was originally developed to shoot aerial video as part of my high school lip-dub video (click on the card to go to the video).
This rocket was later repurposed to fly with a larger motor for two more events:
- School Launch Week launch
- Hiller Air Show Opening + Closing Ceremonies
The gif on the left is video from the rocket being launched at the Hiller Aviation museum as part of the Hiller Air show.

Fin Stab Rocket Mark 1
The image on the left is a fin stabilized rocket module developed by the club I have founded in high school: ARC (Aviation and Rocketry Club). This project uses PD control to keep itself pointing in a specified direction (up) during flight.
Yet to be launched on rocket...
.gif)
Camera Rocket Mark 1
This was the first rocket I was able to fly which was equipped with a camera. This rocket had a makeshift payload bay which was made from the cap of a milk crate and a zip-tie.
Unfortunately, the rocket got stuck in the tree, but we were able to recover the footage.

President/Founder of Aviation and Rocketry Club
Founded the club at the beginning of second semester junior year. Established club with about 30 active members (peak at 50 members). I have led 5 model rocketry launches and have presented several Aerospace topics to my club's members. Founded club with high school physics teachers.

Hiller Aviation Museum Club Launch Team
Organized a launch at a local Aerospace museum. Took part in the annual Hiller Air show by hosting a booth for our club and launched some rockets as part of the show.
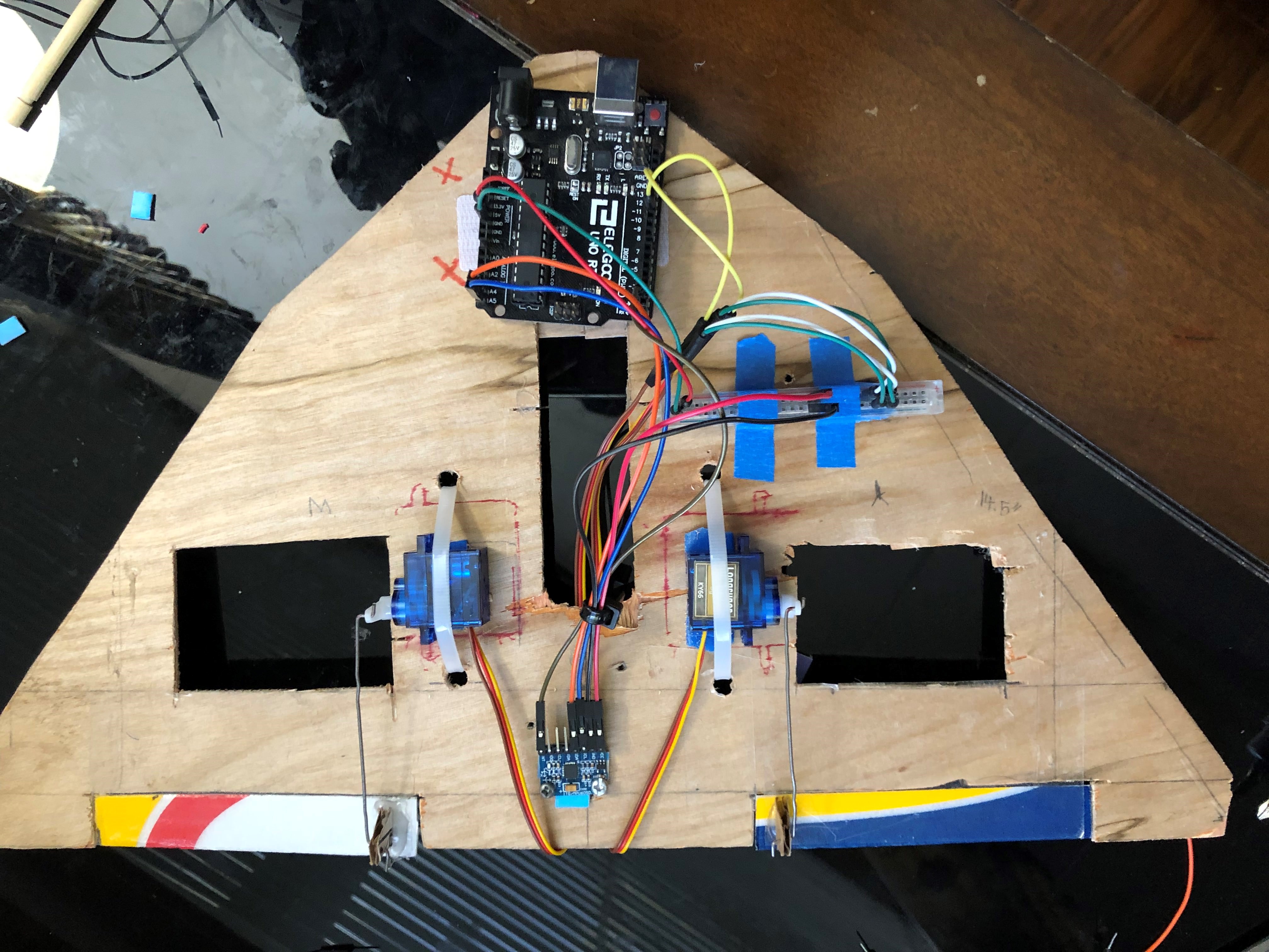
UAV Test Platform
The picture above is the test platform used to test flight controller software before putting them on board the UAV. Confiuration is made for a flying wing (two elevons/ailerons) + single motor.
Used platform to test:
- RC Flight 3 Channel Control
- Barometer Altitude Stabilization/Hold
- Gyro Stabilization

Eagle Project: Box Libraries
As a boy scout, to complete eagle, I had to complete an eagle project. After some research, I had found somewhat of a problem. Up to 61% of low-income families do not have any books for their kids at home. I have addressed this eminent problem by making so called “box libraries” as my eagle project. These "box libraries" are boxes placed in people's yards which consists of books that have been donated by the community. These books can be taken and returned at one's will eliminating the hassle of going to a local library. The “box library” will also give book access to those who need it most.
Funds for this project were raised almost entirely through donations. Books were also collected through book drives that I was able to organize.
Click the card to view a little free library blog post freaturing this project...

Foldable Kayak
This project was one of the first projects I have worked on in boy scouts. I was able to make and paddle a foldable kayak with my Boy Scout troop. Following the build, I was able to attach a GoPro mount to my kayak and have some pretty cool footage available to anyone interested. I almost capsized on this clip...